


Memorable dates
Article
In this paper theorems on the representations of real numbers 𝛼 by using infinite iteration of a sequence of positive monotonic functions 𝛼𝑛 = 𝑓_𝑛(𝑥_𝑛) in the form

where “digits” 𝜆_𝑛, 𝑛 ≥ 0, and “remainders”

are defined by the following recurrent formulas
moreover {𝑧} and [𝑧] denote accordingly the fractional and the integral parts of the real number 𝑧, and 𝑥𝑛 = 𝜙𝑛(𝛼𝑛), 𝑛 ≥ 1, are inverse functions of 𝛼𝑛 = 𝑓𝑛(𝑥𝑛).
In particular, the representation of the number 𝛼 by using function 𝑓(𝑥) = 1/𝑥 leads to the continued fraction of the number 𝛼. The general case when 𝑓(𝑥) is decreasing function have been considered by B.H. Bissinger (1944) and A. R´enyi (1957). For the function 𝑓(𝑥) = 𝑥
𝑞 as 𝑞 ≥ 2 is the natural number, is obtained 𝑞-adic the representation of the form 𝛼 = Σ︀ 𝜆𝑛𝑞−𝑛, where digits 𝜆𝑛, 𝑛 ≥ 1, can to receive all integral values from 0 to 𝑞 − 1. The case when 𝑓(𝑥) is increasing
function have been investigated by C.I. Everett (1946) and A. R´enyi (1957). The representation 𝛼 for 𝑓(𝑥) = 𝑥 𝜃 is nonintegral number 𝜃 > 1 have been studied A. R´enyi (1957) and A.O. Gelfond (1959). In the present paper for the sequence of functions 𝑓𝑛(𝑥) = 𝑥 𝑞𝑛 , 𝑞𝑛 ≥ 2, are
integer, has been investigated the representation of 𝛼 on the multiplicative system of numbers as 𝑛 ≥ 1 in the form 
where digits 𝜆𝑛 can to receive integral values from 0 to 𝑞𝑛 − 1.
A. Kh. Ghyasi (2007) has been generalized Gelfond theorem concerning the multiplicative system of numbers. Let 𝜃𝑛, 𝑛 ≥ 1, be a sequence of real numbers, each of which greater than 1. Then any real number 𝛼, 0 < 𝛼 < 1, can be represented in the form

where the sequence 𝑥𝑛 of error terms is defined by recurrence

and the sequence of integers 𝜆𝑛 is defined by the rule

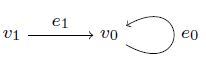
In this paper we present the ongoing research on classifying irreducible representations of the following quiver, or rather the digraph (which throughout this paper we denote by A):
Every representation of A is given by two vector spaces 𝑊0 and 𝑊1, and two homomorphisms 𝜙0 : 𝑊0 → 𝑊0 and 𝜙1 : 𝑊1 → 𝑊0:
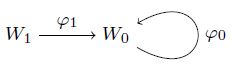
We denote the previous representation by (𝑊1,𝑊0, 𝜙1, 𝜙0). If dim(𝑊0) = 𝑛 and dim(𝑊1) = 𝑚, we may identify 𝑊0 = 𝐾𝑛 and 𝑊1 = 𝐾𝑚, and then 𝜙0 and 𝜙1 are identified respectively with 𝑛 × 𝑛 and 𝑛 × 𝑚 matrices 𝑀0 and 𝑀1, so the above representation is determined by the quadruple (𝑚, 𝑛,𝑀1,𝑀0). We calculate irreducible representations for some 𝑚.



























